Household robots planning long-horizon behavior, such as heating up takeouts and cleaning the kitchen counter, must be able to plan quickly and execute robustly in semantically rich, geommetrically complex environments. This must be done while remaining safe around humans. My current research interest are:
My Google Scholar page is available here.
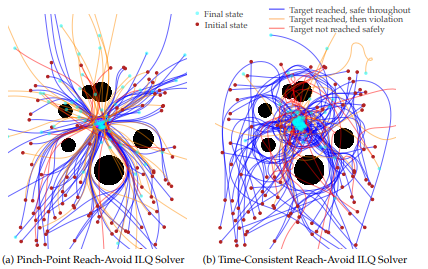
Comparison of Iterative Linear-Quadratic (ILQ) reach-avoid methods evaluated at 100 random initial states. Here, a planar vehicle is required to reach the the center position while avoiding the black obstacles. The existing pinch-point method ignores events that occur after the vehicle first reaches the target, and often leads the vehicle into the failure set. Conversely, our proposed time-consistent method yields trajectories that continue to seek the target while attempting to remain safe at all times..
Back to the Future: Efficient, Time-Consistent Solutions in Reach-Avoid Games.
Dennis R. Anthony, David Fridovich-Keil, Duy Nguyen & Jaime F. Fisac (2021). accepted to IEEE International Conference on Robotics and Automation 2022.
[arXiv] (Full ver. with Appendix)
We study the class of reach-avoid dynamic games in which multiple agents interact noncooperatively, and each wishes to satisfy a distinct target condition while avoiding a failure condition. Reach-avoid games are commonly used to express safety-critical optimal control problems found in mobile robot motion planning. While a wide variety of approaches exist for these motion planning problems, we focus on finding time-consistent solutions, in which planned future motion is still optimal despite prior suboptimal actions. Though abstract, time consistency encapsulates an extremely desirable property: namely, time-consistent motion plans remain optimal even when a robot's motion diverges from the plan early on due to, e.g., intrinsic dynamic uncertainty or extrinsic environment disturbances. Our main contribution is a computationally-efficient algorithm for multi-agent reach-avoid games which renders time-consistent solutions. We demonstrate our approach in a simulated driving scenario, where we construct a two-player adversarial game to model a range of defensive driving behaviors.